

필기 학습자료
HOME > 필기 학습자료





과목 :회로이론 및 제어공학
출제단원 :
-
Q
 3번 / 70문항
3번 / 70문항 -
Q
 4번 / 70문항
4번 / 70문항 -
Q
 5번 / 70문항
5번 / 70문항 -
Q
 6번 / 70문항
6번 / 70문항 -
Q
 10번 / 70문항
10번 / 70문항 -
Q
 20번 / 70문항
20번 / 70문항 -
Q
 22번 / 70문항
22번 / 70문항 -
Q
 23번 / 70문항
23번 / 70문항 -
Q
 24번 / 70문항
24번 / 70문항 -
Q
 25번 / 70문항
25번 / 70문항 -
Q
 27번 / 70문항
27번 / 70문항 -
Q
 29번 / 70문항
29번 / 70문항 -
Q
 33번 / 70문항
33번 / 70문항 -
Q
 37번 / 70문항
37번 / 70문항 -
Q
 39번 / 70문항
39번 / 70문항 -
Q
 40번 / 70문항
40번 / 70문항 -
Q
 43번 / 70문항
43번 / 70문항 -
Q
 45번 / 70문항
45번 / 70문항 -
Q
 48번 / 70문항
48번 / 70문항 -
Q
 50번 / 70문항
50번 / 70문항 -
Q
 51번 / 70문항
51번 / 70문항 -
Q
 53번 / 70문항
53번 / 70문항 -
Q
 55번 / 70문항
55번 / 70문항 -
Q
 56번 / 70문항
56번 / 70문항
코일과 콘덴서의 시간 특성 코일과 커패시턴스는 시간적으로 변하는 특성값이 각각 전류와 전압이므로 급격히 변화할 수 없는 값은 코일에서 전류, 커패시터에서 전압이다.
쌍대관계 테브난의 정리와 노튼의 정리는 상호간에 쌍대관계에 있다. 이것은 서로 등가회로 관계가 성립된다는 것을 의미한다.
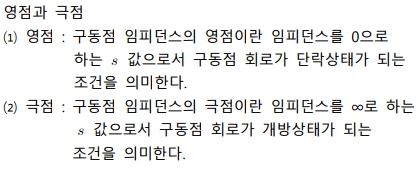
이상적인 전원의 특징 ⑴ 이상적인 전압원실제적인 전압원은 부하전류가 증가할 때 단자전압이 감소하기 때문에 내부저항을 0으로 하여 단자전압을 일정하게 공급할 수 있는 전압원이다. ⑵ 이상적인 전압원실제적인 전류원은 단자전압이 증가할 때 부하전류가 감소하기 때문에 내부저항을 ∞로 하여 부하전류를 일정하게 공급할 수 있는 전류원이다.
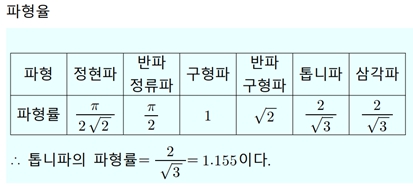
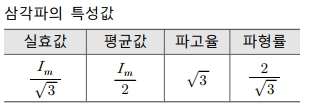
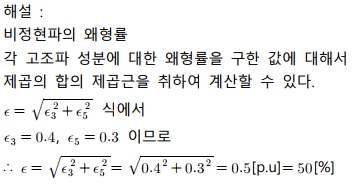
비정현파의 성분 비정현파를 푸리에 급수로 전개할 때 비정현파를 구성하는 성분은 직류분과 기본파, 그리고 고조파의 합성으로 나타난다. ∴ 직류분 + 기본파 + 고조파

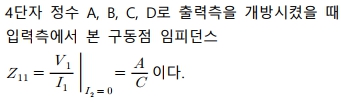
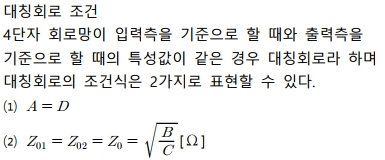
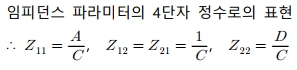
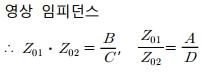
4단자 정수의 성질 및 차원 ⑴ A : 전압이득 또는 입․출력 전압비 ⑵ B : 임피던스 차원 ⑶ C : 어드미턴스 차원 ⑷ D : 전류이득 또는 입․출력 전류비
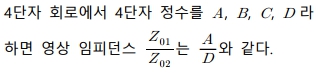
4단자 정수의 성질 및 차원 ⑴ A : 전압이득 또는 입․출력 전압비 ⑵ B : 임피던스 차원 ⑶ C : 어드미턴스 차원 ⑷ D : 전류이득 또는 입․출력 전류비
4단자 정수의 성질 및 차원 ⑴ A : 전압이득 또는 입․출력 전압비 ⑵ B : 임피던스 차원 ⑶ C : 어드미턴스 차원 ⑷ D : 전류이득 또는 입․출력 전류비
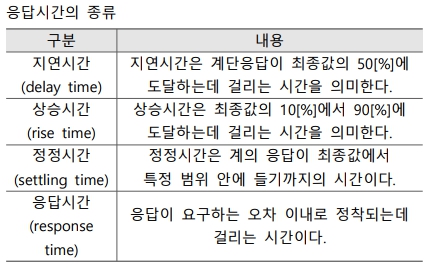
시정수 ⑴ 시정수는 과도기간 중 변화해야 할 양이 63.2[%]가 변화하는데 소요되는 시간이다. ⑵ 시정수는 과도기간 중 변화해야 할 양이 정상전류의 0.632배 변화하는데 소요되는 시간이다.

시간영역에서 사용되는 입력 ⑴ 0형 입력 : 단위계단입력 ⑵ 1형 입력 : 단위램프입력 또는 속도입력 ⑶ 2형 입력 : 포물선입력 또는 가속도입력 ∴ 정현파 입력은 주파수영역에서 사용되는 입력이다.
제어계통의 형태에 따른 정상상태편차 제어계의 입력과 제어계통의 시스템이 서로 일치하는 경우에 정상상태편차는 유한값을 갖는다. 각 제어계의 입력에 대해 유한값을 갖는 경우는 다음과 같다. ⑴ 계단함수 입력에 대한 편차는 위치편차라 하며 위치편차상수 및 위치정상편차로 표현한다. 0형 제어계에서 유한값을 갖는다. ⑵ 경사함수 입력에 대한 편차는 속도편차라 하며 속도편차상수 및 속도정상편차로 표현한다. 1형 제어계에서 유한값을 갖는다. ⑶ 포물선함수 입력에 대한 편차는 가속도편차라 하며 가속도 편차상수 및 가속도 정상편차로 표현한다. 2형 제어계에서 유한값을 갖는다.
절점주파수에서의 이득 ∴ 절점주파수에서 제어계의 이득은 –3[dB]이다.
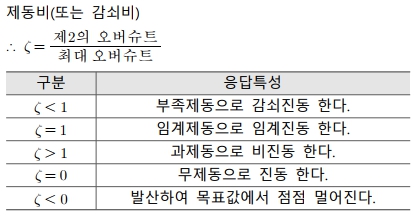
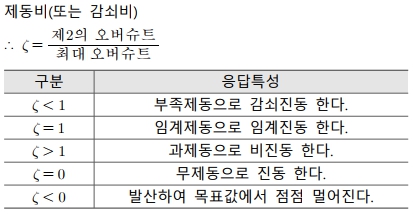
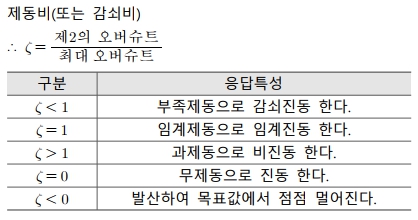
주파수응답에서의 안정도 척도 ⑴ 이득여유가 클수록 안정하다. ⑵ 위상여유가 클수록 안정하다. ⑶ 공진첨두치가 너무 크면 불안정하다. ⑷ 오버슈트가가 너무 크면 불안정하다. ⑸ 제동비가 0보다 작으면 불안정하다. ∴ 고유주파수는 계통의 안정도에 영향을 미치지 않는다.

나이퀴스트 판별법의 특징 ∴ 나이퀴스트 판별에서 오차에 대한 정보는 알 수 없다.
2차 제어계통에 대한 나이퀴스트 선도의 특징 ∴ 이득여유가 ∞ 이므로 제어계가 안정하다.
근궤적법의 정의 제어 계통의 시간 영역에서 과도 응답(시간 응답)을 이용하여 계통의 출력 특성을 해석하고 근의 이동 궤적을 직접 설계하는 방법이다.
근궤적의 성질 근궤적은 극점에서 출발하여 영점에서 끝난다.
근궤적의 성질 근궤적은 실수축에 대해서 대칭이다.
근궤적의 성질 근궤적의 가지수(개수)는 특성방정식의 차수 또는 특성방정식의 근의 수와 같으며 또한 극점의 수와 영점의 수 중 큰 것과 같다.

상태공간해석의 개요 상태방정식은 정해진 형틀 안에 상태변수를 채워 만드는 행렬로서 시간응답과 주파수응답은 동일 시스템에서는 변하지 않는다.

제어편차(동작신호) 기준 입력과 주 궤환량의 차로서 제어계의 동작을 일으키는 원인이 되는 신호이다. 또한 제어요소의 입력 신호이기도 하다.
피드백 제어계의 특징 ∴ 구조가 복잡하고 설치비가 많이 들며 제어기 부품들의 성능이 나쁘면 큰 영향을 받는다.
피드백 제어계통의 각 요소에 대한 용어의 정의 ∴ 제어요소 : 조절부와 조작부로 이루어져 있으며 동작신호를 조작량으로 변환하는 장치이다. 또한 조작량을 제어대상에 공급하는 장치이다.
피드백 제어계통의 각 요소에 대한 용어의 정의 ∴ 조작량 : 제어장치 또는 제어요소가 제어대상에 주는 양으로서 제어장치 또는 제어요소의 출력인 동시에 제어대상의 입력인 신호이다.
피드백 제어계통의 각 요소에 대한 용어의 정의 ∴ 조작량 : 제어장치 또는 제어요소가 제어대상에 주는 양으로서 제어장치 또는 제어요소의 출력인 동시에 제어대상의 입력인 신호이다.
피드백 제어계의 특징 ∴ 입력과 출력 사이의 오차가 감소하여 입력 대 출력비의 전체 이득 및 감도가 감소한다.
제어량에 따른 제어계의 분류 서보기구 제어 : 기계적 변위를 제어량으로 해서 목표값의 임의의 변화에 항상 추종되도록 하는 추종제어인 경우이다. 위치, 방향, 자세, 각도, 거리 등을 제어한다.
비례미적분 동작(PID 제어) ∴ 오버슈트를 감소시키고, 정정시간을 적게 하여 사이클링과 오프셋이 제거되고 응답속도를 빠르게 하여 가장 안정한 제어 특성을 지닌 최적제어이다.
목표값에 따른 제어계의 분류 ∴ 정치제어 : 목표값이 시간에 관계없이 항상 일정한 경우로 정전압장치, 일정 속도 제어장치, 연속식 압연기 등에 해당하는 제어이다.
제어량에 따른 제어계의 분류 ∴ 프로그램 제어 : 목표값이 미리 정해진 시간적 변화를 하는 경우 제어량을 변화시키는 제어로서 무인 운전 시스템이 이에 해당된다. (예 : 무인 엘리베이터, 무인 자판기, 무인 열차)
목표값에 따른 제어계의 분류 ∴ 추치제어에는 추종제어, 프로그램제어, 비율제어가 있다.
연속동작에 따른 제어계의 분류 ∴ 미분동작(D 제어) : 제어편차가 검출될 때 편차가 변화하는 속도에 비례하여 조작량을 가감하도록 하는 제어로서 오차가 커지는 것을 미연에 방지하는 제어이다.
서보모터 서보전동기는 직류 서보전동기와 교류 2상 서보전동기로 크게 나누며 정․역운전이 가능할 뿐만 아니라 회전속도를 임의로 조정할 수 있으며 급가속, 급감속이 용이하다.

 |
| |
| |
| |
| |
|
사업자 등록번호 : 213-86-33926|전화 : 1670-6144 한솔사이버아카데미(온라인교육사업부) 서울특별시 서초구 마방로10길 25 (양재동), 트윈타워 A동 1708호|대표 : 한초롱|통신판매업 신고번호 : 제 2018-서울서초-2644호
사업자 등록번호 : 294-86-01312